

Anteeksi, ajan robottiautoa!
Moni on saanut jo maistiaisia siitä, miltä tuntuu ajaa autoa, jossa robottiäly on kumppanina.
Nykyautossa on lukuisia osajärjestelmiä, jotka tukevat ajamista ja ottavat sitä hoitaakseenkin. Niitä voi pitää askelina kohti itsenäisemmin päättelevien robottiautojen arkea.
Autot havainnoivat jo ympäristön signaaleja ja toimivat automaattisesti havaintojensa mukaan. Auto pysyy kaistallaan, pitää etäisyydet ja parkkeeraa tutkansa avulla itsekseen, jos niin halutaan. Järjestelmät täydentävät ja korjaavat teknistä suoritusta, mutta samalla ne voivat yhä enemmän myös korvata kuljettajan toimia.
Autojen itsetoimisuuden on tarkoitus tuottaa helpompaa ja nautittavampaa ajamista. Varmaan näin onkin, ainakin niin kauan kuin kaikki sujuu suunnitellulla tavalla. Ohjausrobotiikka saattaa kuitenkin jopa oikein toimiessaan tuottaa kuljettajalle myös hämmennyksen hetkiä. On tietysti tarkoituksenmukaista, että vakionopeutta ympäristön mukaan säätelevä auto ottaa tilanteet varman päälle, mutta kenen piikkiin pannaan esimerkiksi sen mahdolliset, turhat ja yliampuvat jarrutukset?
Anteeksi, kanssaliikkujat, autoni tekee hieman outoja temppuja!
Ihmis- ja tekoäly sekoittuvat
Automaation ja robottien tuonnissa keskelle ihmispitoisia liikennejärjestelyjä törmätään paitsi teknisiin haasteisiin, myös vahvasti inhimillisiin ja kulttuurisiin ilmiöihin. Siinä missä meidän on sopeuduttava autojen robotiikkaan, olisi autorobotiikan sulauduttava kulttuuriin. Esimerkkejä pitkään kehittyneistä liikennekulttuureista voi hakea vaikkapa Rooman tai Pariisin kaltaisten suurkaupunkien autoruuhkista. Voi vain ihmetellä, kuinka sujuvasti niiden liikenne on kaikesta ahtaudesta huolimatta saatu sujumaan. Kuin tanssi suorastaan, joskin äänitorvien säestyksellä. Robottiautot eivät hallitse tämän tanssin askelia.
Liikenne on nykyisellään yhä enemmän inhimillisen ja tekoälypohjaisen päättelyn sekoitusta. On vähintäänkin kiinnostavaa nähdä, minkä muodon robotisoituvassa liikenteessä saa ilmiö, jota teknologian sosiaalitieteellisessä tutkimuksessa on kauan alleviivattu: teknologiaan suunnitellut ja sisäänkirjoitetut toimintasäännöt saavat lopullisen muotonsa vasta todellisissa käyttötilanteissa.
Yksi robotisoitumisen riski saattaa piillä meissä itsessämme.
Robottien eduksi lasketaan usein ihmisen suorituksiin nähden suuri tarkkuus ja virheiden määrän pienentyminen. Ehkä auton kamerasilmä tekeekin meiltä ohi menevän havainnon, mutta saatamme myös tottua näiden laitteiden autonomiaan liikaakin ja jopa riskialttiilla tavalla. Entä kun järjestelmät pettävät? Kun auto ilmoittaa pakkasyön jälkeen, etteivät törmäystutka tai adaptiivinen vakionopeudensäädin toimikaan, koska anturit ovat kuurassa, ihmisen on taas otettava vastuu. Mukaudummeko helposti siihen, ettei auto avustakaan niin kuin ennen ja kuten oli tarkoitus? Osaammeko myös yhä jarruttaa, kun sellaiseen jostakin syystä tulee tarvetta?
Olisi tärkeää hallita sekä robotin toivotun että epätoivotun käytön myötä syntyvät odottamattomatkin tilanteet. Meidän kuljettajina tulisi siten ehkä tietää jotakin jopa jarrutuksen algoritmisäännöistä, jotta auton täydellinen hallinta onnistuisi. Mutta sisäistämmekö vaikkapa automaattisen jarrutuksen kulun kaikkine mahdollisine vaihteluineen?
Ongelma on saman sukuinen kuin Boeing 737 MAX -lentokoneen kahdessa traagisessa maahansyöksyssä 2018 ja 2019. Ohjaajien epäillään niissä kompensoineen ohjausautomatiikan outoa, sakkautumista estävää käyttäytymistä tavalla, joka itse asiassa saattoi aiheuttaa koneiden sakkaamisen ja putoamisen. Järjestelmän perimmäisistä piirteistä ei ollut ohjaajia valistettu.
Robottiauton ajamiseen liittyy edelleen myös psykologinen ilmiö, jota kutsutaan käsitteellä kognitiivinen tiedostamaton. Kun psykoanalyyttiseen tiedostamattomaan liittyy alitajunnasta kumpuavat motiivit ja tunne-elämän kompleksit, kognitiivisella tiedostamattomalla viitataan ihmisen automatisoituihin tiedollisiin toimintoihin. Edelleen, ei autonomiseen hermostoon eli siihen, kuinka elimistömme toimii ilman tietoista pyrkimystämme pitää vaikkapa sydän käynnissä, vaan siihen, kuinka jotkin arjen toiminnot automatisoituvat siten, että toimimme aktiivisesti sitä tiedostamatta. Kognitiivisen tiedostamattoman piikkiin menee esimerkiksi se, kun ajamme autoa tuttua reittiä ja havahdumme yhtäkkiä kysymykseen, miten olemmekaan jo täällä asti.
Ilmiö ei ole aivan vaaraton ja liikenneturvallisuuden asiantuntijat suosittelevatkin esimerkiksi työmatkareitin vaihtelemista, ettei ajosta tulisi liian automatisoitua. Ajaminen vaatii keskittymistä ja ihmisen tehokas taipumus automatisoida omia toimintojaan voi kääntyä myös itseään vastaan. Aktiivisen omaehtoisen ajamisen muuttuminen automatisoidun ajamisen valvomiseksi kuormittaa ajattelumme edelleen, mutta hieman eri tavalla.
Automatiikan valvontakin kuormittaa
Muutos auton kuljettajasta kuljettamisen valvojaksi on psykologisesti kiinnostava, koska autojen vähittäisen automatisoimisen tavoitteena on ollut liikenneturvallisuuden parantamistakin enemmän tehdä auton ajaminen kuljettajalle helpommaksi. Valvontatyö on kuitenkin ihmiselle hyvin kuormittavaa, koska sivusta seuraaminen vaatii herkeämätöntä keskittymistä ilman kehollista yhteyttä tehtävään työhön. Tietyllä tapaa valvontatyö olisikin tekoälyllisen robotin heiniä.
Autolla ajamisen ja liikennejärjestelmien automatisointia voi valvonnan lisääntymisen näkökulmasta verrata teollisuudessa tapahtuneeseen kehitykseen. Tuotannon teollistumisen alussa liukuhihnalla tehtiin kokoonpanoa ihmiskäsin, mutta nykyään työntekijät vain seuraavat automatisoituja linjastoja läheltä tai kauempaa valvontakeskuksesta. Teollisuudesta saatu kokemus ei puolla yksiselitteisesti väitettä, että valvottu robotiikka poistaisi ihmiseltä kuormituksen kokonaan. Esimerkiksi Tzafestas (2010, 31) kirjoittaa, että teollisen työn muuttuminen itse tekemisestä työn valvomiseksi ei ole muuttanut työtä kevyemmäksi, koska valvontatyö vaatii erityistä tarkkaavaisuutta samalla kun se muuttaa työnkuvaa yksitoikkoisemmaksi. Toisaalta ainakin yhdessä kokeellisessa tutkimuksessa automaattiohjauksella olevaa autoa ajavilla havaittiin vähemmän kognitiivista kuormitusta kuin itse autoa ajavilla (Arakawa et al., 2019).
Liikenteen robotisaatiossa on paljon mahdollisuuksia, mutta myös riskejä, joista osa kulminoituu ihmisen ja tekoälyn perustavaan erilaisuuteen. Jotta tukisimme ihmisen keskittymistä liikenteessä, voitaisiinkin tällä hetkellä nähtävä autojen automaattisen toiminnan asetelma keikauttaa ympäri. Aktiivisen kuljettajan roolin voisi säilyttää ihmisellä ja antaa valvojan roolin tekoälylle. Tämä tarkoittaisi sitä, että hylkäisimme ajatuksen itsestämme automme kulun sivustaseuraajina ja säilyttäisimme liikenteen ihmisten välisenä sosiaalisena toimintana.
Toisena skenaariona on huipputason robottiautoliikenne, jossa ajoneuvot keskustelisivat toistensa kanssa. Yksittäisen ajoneuvon antureiden ja tekoälyn lisäksi niitä yhdistäisi parviäly. Yhtenäinen ja toistensa kanssa yhteydessä oleva autokanta olisi sekä joustava että turvallinen. Toisaalta tämä on myös varsin dystooppinen näkymä tilanteessa, jossa ajoneuvot ja parviäly olisivat hakkeroinnin kohteena. Lisäksi olisiko tämä tulevaisuus sosiaalisesti hyväksyttävä? Jos liikenne robotisoitaisiin kokonaan, eivät ihmiset enää saisi ajaa autoja. Eivät, koska eivät ole laitteiden tapaan integroitu verkkoon (”Internet of things”) ja koska olisivat poikkeavan huonon reagointinopeutensa vuoksi iso uhka liikenneturvallisuudelle.
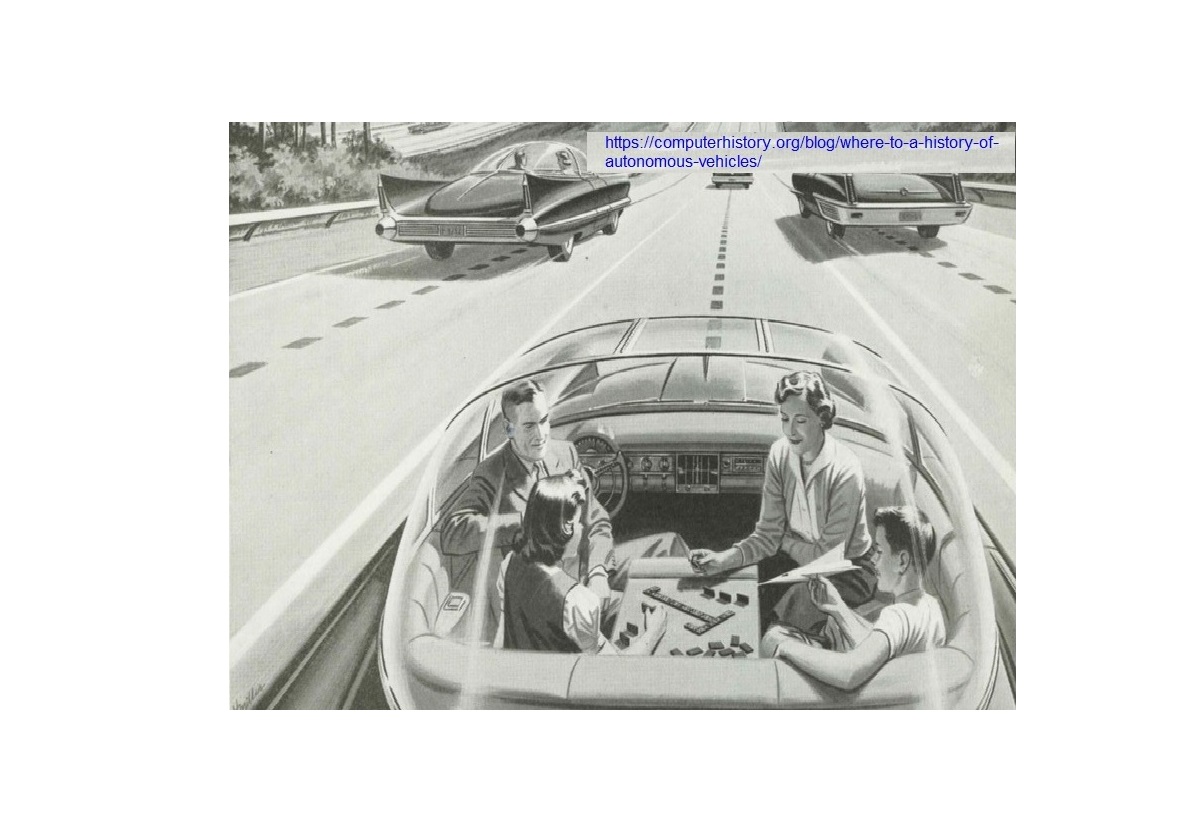
Yllä olleessa kuvassa (Lähde) näemme itsekseen kulkevan robottiauton ja tiehen upotetut ohjaussignaalit. Kuva on sähkön käytön markkinointikampanjasta 1950-luvulta. Siinä tie on jo älykäs, mutta rattikin on paikallaan. Tuota unelma-autoa siis voi ja saa vielä ajaa itsekin.
Robottiautojen kehittelyssä isojen linjojen aika on nyt. Tuleeko ihmiskuljettajalla olla oikeus tai velvollisuus puuttua ajoon? Tavoitellaanko lopulta robottiautojen kehitystyöllä ihmisten liikuttelua paikasta toiseen vai otetaanko huomioon yksityisautoilijan halu liikkua ja tehdä se omilla ehdoillaan?
*******************************
Kiitokset kommenteista:
Toni Häkkinen
Lähteet:
Arakawa, T., Hibi, R., & Fujishiro, T. A. (2019). Psychophysical assessment of a driver’s mental state in autonomous vehicles. Transportation research part A: policy and practice, 124, 587-610.
Tzafestas, S.G. (2010). Human and Nature Minding Automation. Springer, Berlin, Germany.


Kommentit