QT & Misty (Interaction-piste)
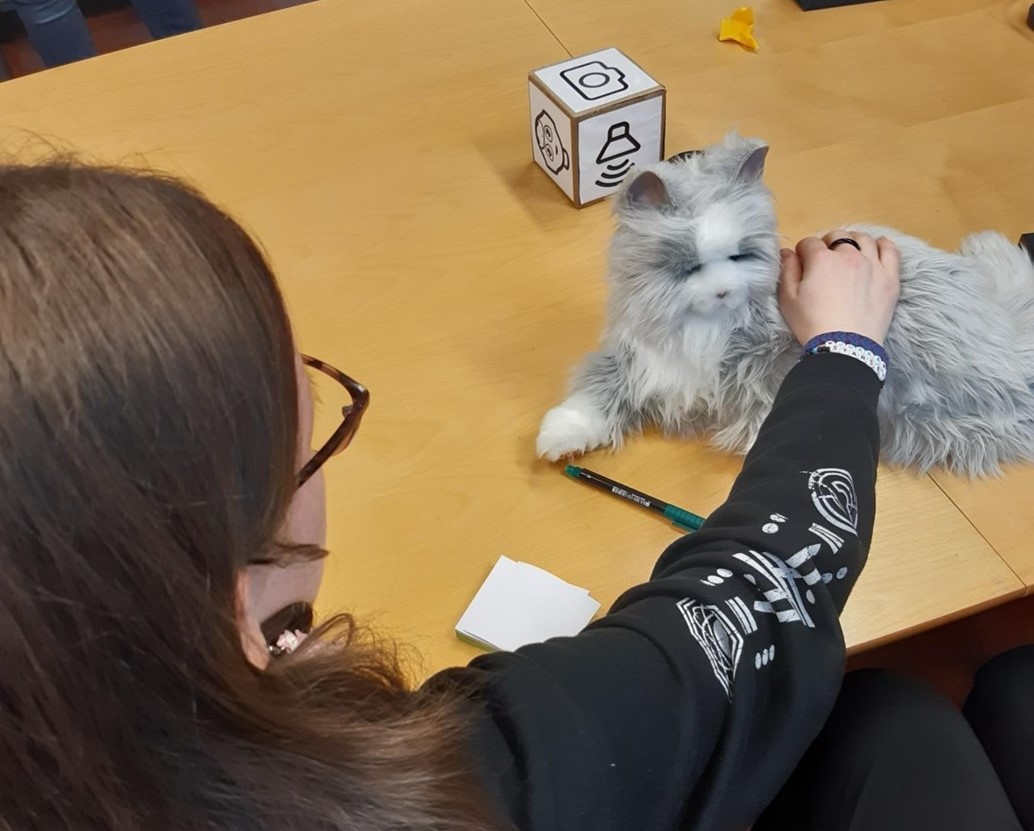
Ihmisten ja sosiaalisten robottien vuorovaikutusta käsittelevällä pisteellä keskusteltiin paljon suhtautumisesta robotteihin sekä sosiaalisten robottien mahdollisista käyttötarkoituksista. Keskustelun lisäksi vastattiin yliopiston opiskelijoiden gallup-kysymyksiin. Keskusteluissa esiin nousseita aiheita olivat muun muassa luottamus robotteihin, niiden herättämät tunteet ja mahdolliset käyttökohteet. Työpajassa esimerkkirobotteina olivat QT- ja Misty-nimiset robotit sekä suloinen kosketukseen reagoiva robottikissa.
Opimme, että QT-robottia voidaan käyttää esimerkiksi autististen lasten apurina, jotta he voisivat ymmärtää paremmin toisten ihmisten tunteita. Robottikissaa voidaan käyttää esimerkiksi vanhusten hoidossa ja terapiakäytössä, joissa allergiatekijät estävät oikeiden eläinten käytön. Lisäksi kissaa voidaan mahdollisesti käyttää totuttamaan pieniä lapsia lemmikkieläimiin. Misty taas vastaavasti on varsin yleiskäyttöinen apuri, jota voidaan käyttää esimerkiksi kouluissa oppimisen tukena ja joka osaa tehdä ilmeitä.

Työpajassa muun muassa tunnistettiin Mistyn erilaisia ilmeitä, mikä osoittautui yllättävän haastavaksi johtuen siitä, että Mistyllä ei ollut suuta ja ilmeiden luominen keinotekoisesti pelkillä silmillä on hyvin haastavaa. Saimme myös tabletilla ohjaamalla kokeilla itse vaihtaa Mistyn ilmeitä. Työpaja oli mielestämme oikein mukava ja mielenkiintoinen ja yliopisto-opiskelijoiden kanssa keskustelu oli kivaa ja työpajassa vallitsi hyvä ilmapiiri. Lisäksi kissa oli todella söpö.
Pepper & Paro (Awareness-piste)
Robottitietoisuus-pisteellä pohdittiin lukiolaisten havaintoja roboteista erilaisissa ympäristössä. Tällä pisteellä tapasimme Pepperin ja Paron. Paro on vanhempi hyljerobotti, joka reagoi kosketukseen äänin ja pienin liikkein. Opimme, että hyljerobotti on ollut käytössä esimerkiksi vanhainkodeissa vanhusten seuralaisena. Paro oli perjantain työpajojen ehdoton lempirobotti ja lukiolaiset toivoivat sellaista myös omalle koululle.
Pepper taas reagoi liikkeeseen ja puheeseen. Se piti meille tietovisan Tampereen eri paikoista ja kohteista, joihin tuli vastata joko englanniksi puhumalla tai koskemalla Pepperin näyttöä. Äänentunnistus ei aina toiminut, joten päädyimme pääosin vastaamaan kysymyksiin näytölle. Pepper reagoi liikkeeseen kääntämällä päätään liikettä kohti ja se vastasi puheeseen.
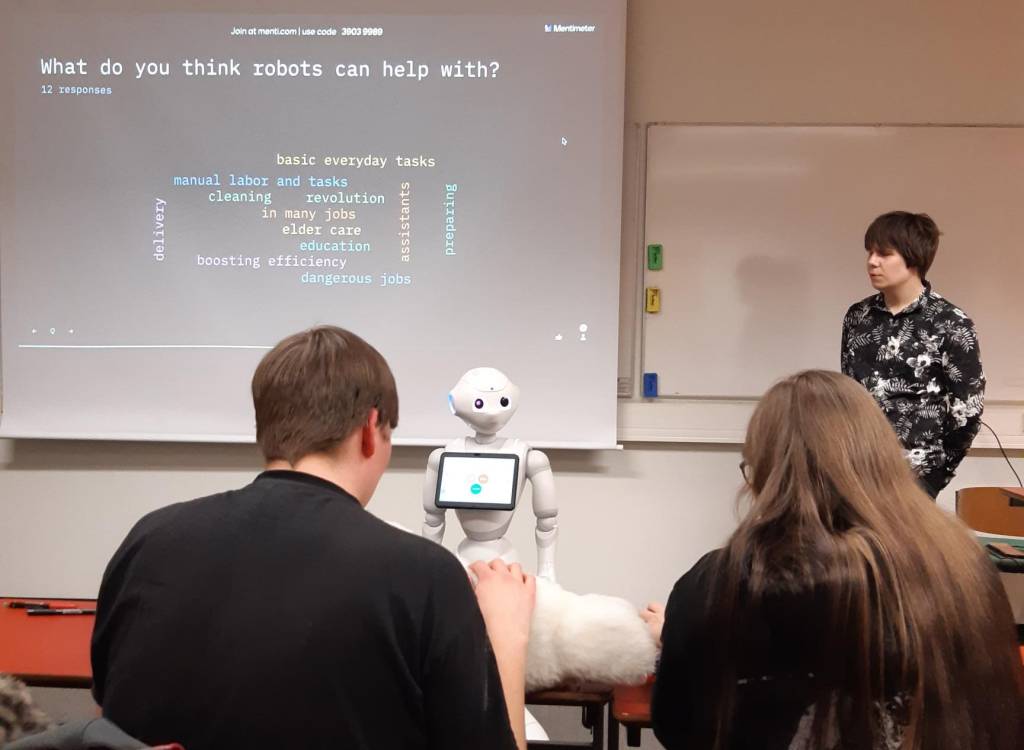
Työpajalla tehtiin myös kysely roboteista ja meidän tietämyksestämme niistä. Kysymykset ilmestyivät valkokankaalle. Kävimme läpi muun muassa tietämiämme robottihahmoja mediassa ja arkielämässä.
Reachy & Alpha Mini (Envisioning-piste)
Pisteellä envisioning meidät esiteltiin Reachy ja Alpha Mini roboteille. Alpha Mini on pienikokoinen robotti, joka pystyy tanssimaan ja jonka kanssa pystyy puhumaan. Se on tehty esittelemään teknologiaa, jota hyödynnetään tulevaisuudessa isommissa palveluroboteissa. Sitä voidaan myös käyttää robottiohjelmoinnin opetukseen.
Reachy on noin ihmisen pituinen virtuaalitodellisuuslasein ohjattava robotti. Reachylla on kädet, joita ohjataan lasien ohjaimilla, ja käsille se voi esim. nostella asioita pöydältä. Sitäkään ei käytetä käytännön tehtävissä, vaan esittelemään robotiikan mahdollisuuksia.
Alpha Miniin liittyi pieni tietoturvallisuusriski, jonka takia sen etukamera piti peittää sinitarralla, ja se piti viedä eri huoneeseen, jotta se ei nauhoittaisi puhetta.

Furhat (luottamus robotin antamaan tietoon-piste)
Furhat-robotti on uudenajan humanoidi-robotti, joka osaa seurata katsellaan henkilöä, joka sille puhuu ja vastata kysymyksiin. Furhat-robotti esitti lukiolaisten lapuilta luettuihin kysymyksiin vastauksia, ja lukiolaisten piti päättää, oliko vastaus luotettava vai ei. Kaikki vastaukset kuulostivat ihan järkeenkäyviltä, mutta lopuksi paljastettiin, että niissä kaikissa oli virheellistä tietoa. Vastaukset, jotka Furhat-robotti esitti, eivät tulleet reaaliajassa vaan oli ennen pajan alkamista udeltu tekoälyltä, jolle oli syötetty harhatietoa. Furhat-robotti ei myöskään itse esittänyt vastauksia, vaan ihminen oli koko ajan kontrolloimassa sitä, mitä Furhat sanoi ja milloin.
Robotti herätti ajatuksia siitä, että vaikka niin sanottu luotettava taho/ekspertti esittää tiedon totena, ei se ole sitä välttämättä lainkaan. Vastauksia ei kyseenalaistanut, jos ei entuudestaan tiennyt aiheista mitään. Jotkut toki pystyivät aavistamaan jotain, mutta valtaosa meni lankaan, mikä oli todella havahduttava hetki. Moni oli samaa mieltä pajan jälkeen, ja niinpä kokemus vaikutti meidän suhtautumiseemme tietoon. Kaikkeen ei voi todellakaan luottaa. Tämä on tärkeä huomio myös tekoälyn käytössä ilman robottiakin.
Työpaja myös esitti aluksi, että Furhat oli itse hankkinut kaiken tiedon ja osasi vastata itsenäisesti. Kukaan ei suoranaisesti kyseenalaistanut tätä. Furhatilla tosin on kyky toimia itsenäisesti. Furhatin ei kuitenkaan työpajassa annettu toimia itsenäisesti, koska sen esittämä tieto ei olisi ollut yhtä hallittua ja se olisi voinut sanoa jotain sopimatonta lukiolaisille.
Tämä loppupaljastus siitä, että Furhatia ohjaili yksi työpajaa pitäneistä yliopisto-opiskelijoista huoneen nurkassa, oli yllättävää siinä hetkessä, mutta jälkeenpäin ajatellen Furhatin taidot vaikuttivat liian kehittyneiltä. Jos paljastusta ei olisi tehty, on hyvin mahdollista, että kukaan ei olisi tiennyt totuutta Furhatin kyvyistä.
Nao (koodaus-työpaja)
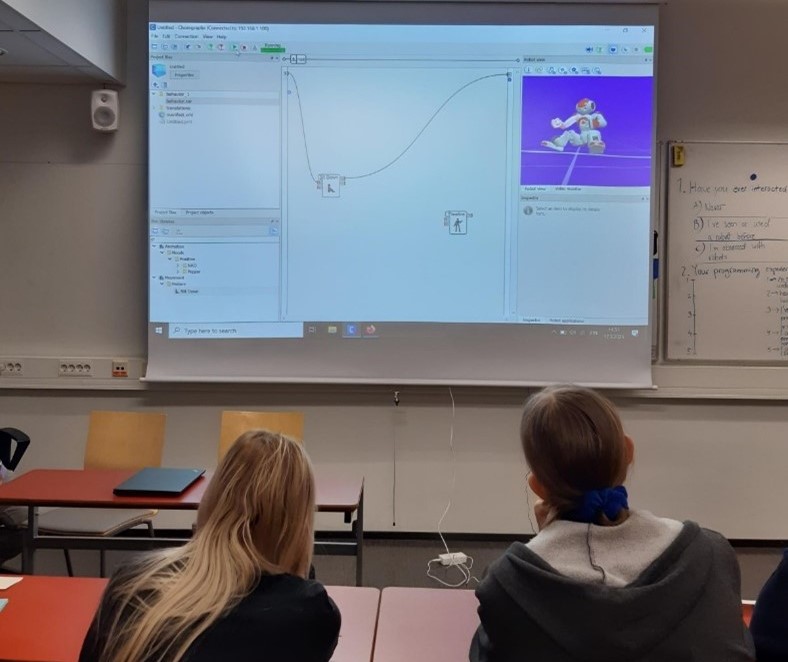
Harjoittelimme Nao-robotin kanssa yksinkertaista käskynantoa sekä koodausta. Tämä harjoitus alkoi Naon esittelyllä, jossa tämä robotti esitti Macarena-tanssin edessämme. Ohjelmoijien selitettyä meille Naon toimintaperiaatteen saimme tilaisuuden antaa sille käskyjä palikkaohjelmoinnin avulla. Kaksi lukion opiskelijaa tarttui tarjoukseen, jolloin heille annettiin pikakurssi palikkaohjelmoinnista. Tämän jälkeen annoimme Naolle yksinkertaisia käskyjä, kuten istumista ja tervehtimistä. Kaikki liikkeet eivät valitettavasti sujuneet mallikkaasti, koska Nao itsessään oli melko vanha robotti, eikä saanut enää ohjelmistopäivityksiä.
Naon kanssa toimiminen oli hyvin kiehtova tilaisuus tutustua robottien ohjelmointiin sekä käskyjenantoon. Mielestämme robotin liikkeiden tarkkailu sekä palikkaohjelmointi olivat todella mieleenpainuvia, ja ohjelmoinnin helppous yllätti. Robotin liikkeet olivat myös yllättävän sujuvia toisiin samankaltaisiin robotteihin verrattuna, sillä olihan sillä ihmismäinen olemus.
Spot ja AlphaMini (etiikka-piste)
Pääsimme kokeilemaan tabletilla sovelluksen kautta robokoira-Spotin ohjausta. Harjoittelimme ohjata, mihin suuntaan robotti kääntyi, katsoi ja liikkui. Meille kerrottiin robotin perustietoja ja varoitettiin, että ei saa mennä liian lähelle tai koskea, koska robotti oli vahva ja voisi vahingossa satuttaa ihmistä. Spot maksaa noin 100 000 euroa.
Työpisteen lopuksi täytimme myös kysymysmonisteen ja QR-koodin. Kysymysmonisteessa kysyttiin, mitä mieltä olisimme esimerkiksi, jos Spotia käytettäisiin koulussa, vaikka oppilaiden kanssa erilaisissa tehtävissä. Spotin ohjaaminen oli jännää, mutta onnistui melko helposti.

Lisäksi pääsimme tutustumaan Alpha Mini -robottiin eli pieneen, sympaattiseen laitteeseen, joka puhui lempeästi, näytti silmillään ilmeitä ja herätti heti sympatiaa. Aluksi robotin sensorit oli peitetty, ja se pyysi meitä ottamaan peittävän osan pois. Useimmat meistä vastasivat kyselyyn myöntävästi. Ohjaaja kertoi meille robottien eettisistä haasteista ja tietosuojan ongelmista. Robotti kerää tietoa ja sitä pystyi ulkoisesti ottamaan talteen. Tämän jälkeen meiltä kysyttiin uudelleen, ottaisimmeko vielä peitteen pois? Monet muuttivat selityksen takia vastauksensa. Tämä oli meille uutta tietoa tietoturvahaasteista robotteihin liittyen.
Lukiolaiset totesivat työpajojen jälkeen, että oli todella hienoa, että pääsi oikeasti toimimaan robottien kanssa ja tekemään tehtäviä yliopisto-opiskelijoiden kanssa, eikä vain katsomaan esittelyä roboteista. Toiminnallisuus oli siis todella mukava yllätys työpajoissa. Lisäksi jokaisessa työpajassa oppi uutta samalla kun työskentely oli yliopistolla erityisen kivaa! Paro-hylje jäi erityisesti lukiolaisten mieleen – ja se on ollut keskustelujen aiheena työpajojen jälkeenkin.
Opintojaksolla oli lukiolaisia Tampereen teknillisestä lukiosta, Klassillisesta lukiosta, Sammon keskuslukiosta, Tammerkosken lukiosta ja Hatanpään lukiosta. Kiitämme kaikkia työpajojen pitäjiä ja odotamme projektin lopputapaamista, RoboCarnivalia innolla!
Opintojaksoa opettaa Teknillisellä lukiolla psykologian lehtori Heidi Meltovuo. Yliopiston työpajoja ohjasi senior lecturer Aino Ahtinen.
Työpajakuvaukset ovat lukiolaisten kirjoittamia, blogitekstin koonnin teki Heidi-ope. Kaikkiin kuviin on kysytty julkaisulupa kuvissa esiintyviltä henkilöiltä.