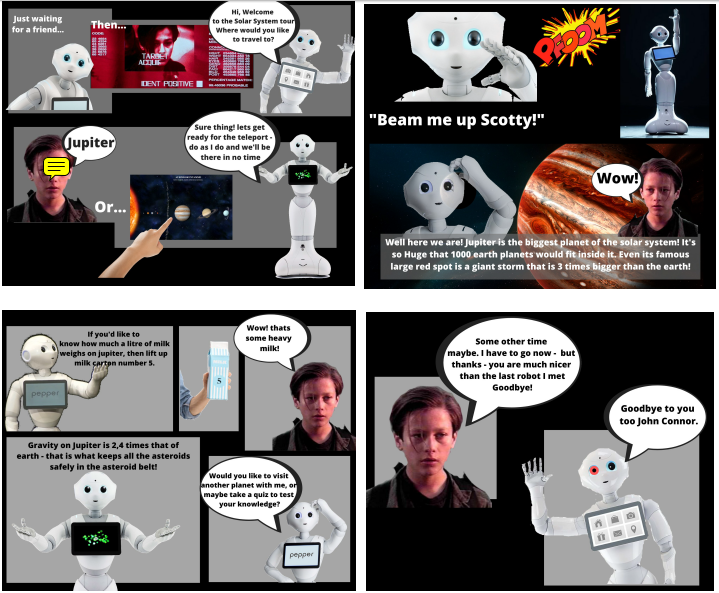
Video about Pepper as an interactive tour guide to the solar system.
In keeping with the general approach to learning promoted by Juniversity, the experience should be simple, immersive and hands on, with an emphasis on making learning fun. Science Stop is a bi-weekly open doors event which typically comprises four to five hands on experiments or learning experiences grouped around a central theme. Together with the staff of Juniversity, we decided that the theme of “Space” would be ideal for our final implementation.
In addition to science stop events, Juniversity also has visiting schoolgroups on a daily basis as well as science clubs, workshops and teacher training events. This provided us with ample opportunities to gain initial reactions to the use of our social robotic platform, both from the point of view of end users (children and their families) and secondary users (the event leaders and teachers) it would also provide us with an idea of the technical challenges we would come to face.
Having completed several observation sessions and a focus group interview with the teachers and staff of university, we set about analysing the data we had gathered in order to come up with our design implications and concept, and finding creative solutions to the problems we encountered in the initial field test.
Despite the requirements of this course to “implement a small part of the concept”, due to the nature of the event, the association with Tampere University’s youth outreach and the importance of providing quality educative experience to the children involved, we deemed it necessary to carry this a little further. Thus we set about creating a full working prototype with complete functionality (albeit at a minimum level to adequately present the concepts involved).
As a robotic platform we chose Pepper, due to the flexibility of possibilities for interactive presentation afforded by the combination of social dialog, tablet, gesture and sensors. In addition, the size and visibility of the robot made it ideal for attracting visitors and passers by. The application itself involved a free exploration of the planets of the solar system, whereby the end user could tell the robot either verbally or with touchscreen contol, where they wished to travel to and the robot would make a short presentation about each planet. The verbal presentation was supported by statistical data and visuals on the screen, as well as by prompted interaction with concrete examples and experiments in the surroundings.
The final implementation and test of concept was carried out at science stop on Monday 25.11.2019 and the event was attended by around 50 families who enjoyed interacting with the robot at that time. The response overall was favourable, and despite its design as being primarily for a one time pop up event, the same application has since that time been successfully used with visiting groups of schoolchildren participating in robotics programming and space workshops.
In general one of the most important lessons we learned from this, other than the teamwork and programming skills required for such a project, was in the difference between adult based and child based HRI. Unless using a robot platform designed specifically with children in mind, this leads to challenges in almost all aspects of HRI. Related to this is the importance of taking a holistic viewpoint when designing robotic solutions for child interaction. Immersion of all the senses, supporting materials and the environment of interaction play a huge role in the overall quality of the experience. Whilst much of the general focus in User Experience seems to be on technical and psychological aspects of Human robot interaction, the overall quality of the experience is much broader than just the verbal back and forth between man and machine and goes far beyond simple usability. As such aesthetic, spatial and environmental factors etc. should not be overlooked.
Written by the course project team,
Rich Raja-Aho, Akseli Koskela & Muhammad Sayedur Rahman